Interruzione e continuazione dei movimenti
IL Robotics_Interrupt_Continue.project progetto di esempio qui descritto si trova nella directory di installazione di CODESYS Sotto ..\CODESYS SoftMotion\Examples.
Questo esempio mostra come i movimenti comandati possono essere interrotti con SMC_GroupInterrupt blocco funzione e ripreso in un secondo momento con il SMC_GroupContinue blocco funzione. Il gruppo di assi può eseguire qualsiasi movimento tra l'interruzione e la continuazione.
Struttura dell'applicazione
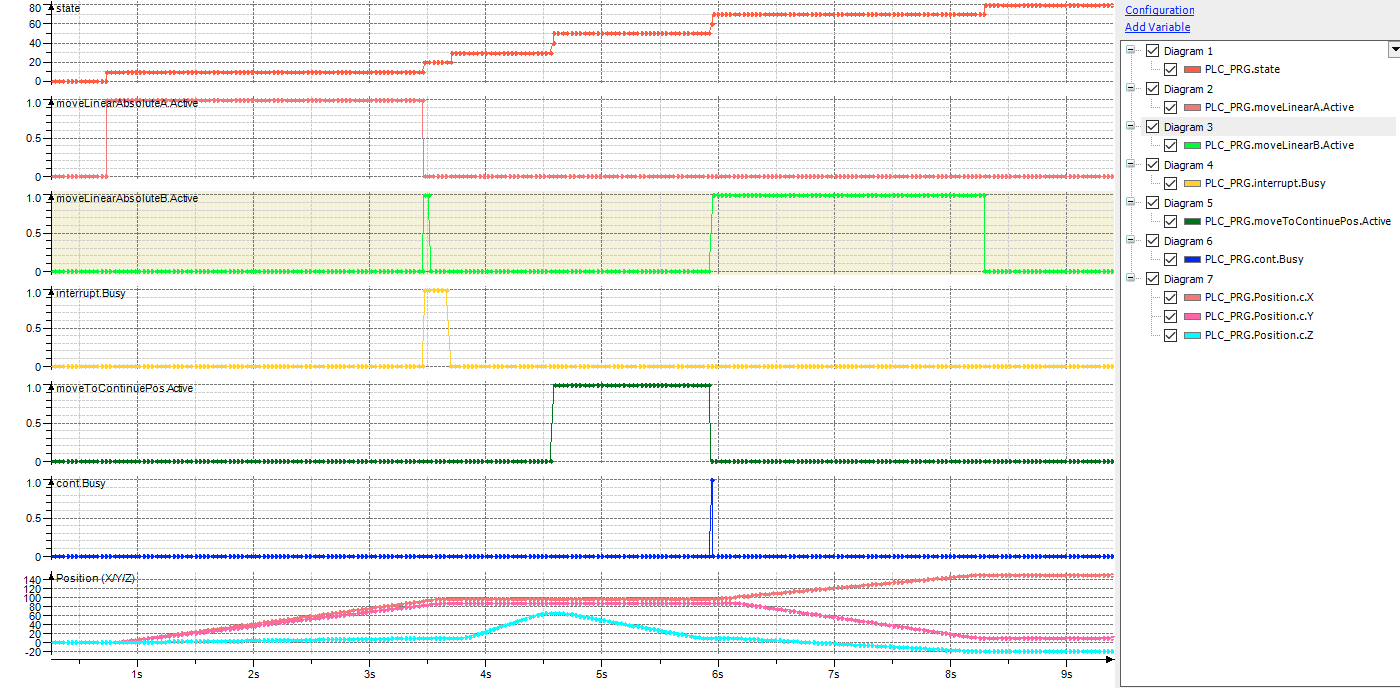
L'applicazione consiste in una semplice macchina a stati nel formato PLC_PRG programma e una traccia per tracciare facilmente le transizioni di stato.
Innanzitutto vengono abilitati gli assi e il gruppo di assi. (
STATE_POWER_ON)Poi, due movimenti,
moveLinearAEmoveLinearB, vengono comandati con la fusione. (STATE_START_MOVING)Non appena è attivo il secondo movimento (quando inizia la miscelazione), il movimento viene interrotto. La causa potrebbe essere ad esempio il rilevamento di un difetto dell'utensile.
(STATE_INTERRUPT)Un movimento PTP relativo viene eseguito nella direzione Z positiva, ad esempio, per sostituire l'utensile dopo il difetto.
(STATE_INTERMEDIATE_MOVEMENT)Prima di riprendere il sistema ritorna nella posizione in cui il movimento originario era stato interrotto. (
STATE_GET_CONTINUE_POS/STATE_MOVE_TO_CONTINUE_POS)Viene ripreso il movimento originale.
(STATE_CONTINUE)
Utilizzo
Compilare il programma creato ed effettuare il login. Per tracciare i diversi stati è possibile scaricare la traccia nel controller. Avviare l'applicazione.